Omologia (topologia)

L'omologia, assieme all'omotopia, è un concetto fondamentale della topologia algebrica. È una procedura con cui viene assegnata a un certo oggetto matematico (come uno spazio topologico o un gruppo), una successione di gruppi abeliani, che forniscano in qualche maniera informazioni sull'oggetto in considerazione.
In topologia, l'omologia di uno spazio topologico è un gruppo abeliano


che informalmente misura il numero di "buchi -dimensionali" dello spazio . Un concetto analogo è il gruppo fondamentale.

Descrizione
L'omologia di uno spazio topologico è una successione di gruppi abeliani, che vengono indicati nel modo seguente:

Informalmente, il gruppo descrive i "buchi -dimensionali" di . Esistono vari modi (essenzialmente equivalenti) di definire l'omologia: si parla quindi a seconda del caso di omologia singolare, omologia simpliciale, etc.


Un esempio fondamentale è fornito dalla sfera -dimensionale, indicata in matematica con il simbolo . Tale "sfera" è in realtà una circonferenza in dimensione , ed è l'ordinaria superficie sferica per . Può essere descritta come il luogo dei punti dello spazio euclideo -dimensionale che soddisfa l'equazione seguente:







L'omologia della sfera è la seguente:

I simboli e indicano rispettivamente il gruppo dei numeri interi ed il gruppo banale. L'omologia della sfera è quindi banale per ogni , tranne che per i valori 0 e . La non-banalità per è un fatto generale, valido per ogni spazio topologico. L'informazione per registra invece l'esistenza di un "buco" -dimensionale.



Questo buco -dimensionale può essere "tappato" aggiungendo alla sfera la sua parte interna (ovvero la porzione di piano o spazio delimitata dalla sfera). La circonferenza diventa così un cerchio, e la superficie sferica diventa una sfera solida, cioè una palla. In matematica, l'oggetto ottenuto tappando la sfera è chiamato disco (o palla): è indicato con il simbolo e può essere definito come il luogo dei punti che soddisfa la disequazione seguente:


L'omologia del disco risente del fatto che il buco è stato tappato:

Tutti i gruppi di omologia (tranne quello con ) sono banali: informalmente, il disco non contiene buchi.






Uno spazio topologico può avere più buchi di dimensioni diverse. Ad esempio il toro ha tutti e tre i primi gruppi di omologia non banali:


L'omologia è quindi usata in prima istanza come strumento per distinguere oggetti topologici.
Definizione
L'omologia di uno spazio topologico è costruita tramite un procedimento algebrico abbastanza raffinato. Si costruisce a partire da un complesso di catene . Il complesso di catene è una successione di gruppi abeliani e di omomorfismi chiamati operatori di bordo. Tutti questi oggetti possono essere descritti da una catena di simboli nel modo seguente:




dove indica il gruppo banale. Si richiede inoltre che la composizione di due operatori di bordo consecutivi sia nulla, cioè che per ogni valga la relazione


Ciò è equivalente a chiedere che l'immagine di sia contenuta nel nucleo di :



Se immagine e nucleo coincidono per ogni la sequenza si dice esatta. Generalmente però questo non accade; l'omologia "misura" proprio quanto la successione sia lontana dall'essere esatta.
Poiché ogni gruppo è abeliano, le immagini sono tutte sottogruppi normali ed è quindi possibile definire l'-esimo gruppo di omologia come il gruppo quoziente


Viene spesso usata anche la notazione seguente


Gli elementi in e sono chiamati rispettivamente cicli e bordi. L'omologia è quindi



Il complesso di catene può essere costruito in vari modi, ma l'omologia che ne risulta è generalmente equivalente. A seconda del metodo scelto per costruire si parla quindi di omologia simpliciale, singolare, cellulare, etc.
Proprietà
Funtorialità
L'omologia è un funtore dalla categoria degli spazi topologici in quella dei gruppi abeliani. In altre parole, l'omologia (ad ogni livello fissato ) associa ad ogni spazio un gruppo in modo funtoriale: ogni funzione continua


induce un omomorfismo di gruppi

che soddisfa alcuni assiomi naturali:



Da questi due assiomi discendono ad esempio due fatti non banali:
- se è un omeomorfismo allora è un isomorfismo,
- se è una retrazione su un sottoinsieme di , allora è suriettiva (e l'inclusione induce una mappa iniettiva).



Anello dei coefficienti
L'omologia dipende, oltre che dal parametro , anche dalla scelta di un anello . I gruppi del complesso di catene risultano essere dei moduli su . Anche i gruppi di omologia sono degli -moduli e vengono indicati con il simbolo



Nella maggior parte dei casi è l'anello degli interi oppure un campo. Se è un campo i gruppi di omologia sono degli spazi vettoriali e la loro dimensione (se finita) è detta numero di Betti:

Il numero di Betti può essere interpretato grossolanamente come il "numero di buchi -dimensionali" di .

Se è l'anello degli interi il gruppo di omologia è un gruppo abeliano che può generalmente contenere elementi di torsione.
Omotopia
L'omologia è invariante per omotopia: deformazioni continue di mappe e spazi lasciano l'omologia immutata. Più precisamente, due mappe

omotope inducono lo stesso omomorfismo

Tra le conseguenze di questo fatto:
- Due spazi omotopicamente equivalenti hanno gruppi di omologia isomorfi,
- Se un sottoinsieme di è un retratto di deformazione di , l'inclusione induce un isomorfismo in omologia.
Complessi di celle, varietà
Se lo spazio topologico è descrivibile come un complesso di celle è possibile calcolare l'omologia agevolmente usando l'omologia cellulare. Analogamente, se è descrivibile come complesso simpliciale può essere usata l'omologia simpliciale.
Se è un complesso con un numero finito di celle e l'anello di base è un campo, valgono i fatti seguenti:
- Lo spazio vettoriale ha dimensione finita per ogni .
- Se è la dimensione massima delle celle, allora per ogni .


Con queste ipotesi è quindi ben definita la caratteristica di Eulero

La caratteristica di Eulero è un importante invariante dello spazio topologico . A differenza dei numeri di Betti, la caratteristica non dipende dal campo scelto.
Ad esempio, ogni varietà differenziabile compatta di dimensione è descrivibile come complesso di celle finito.
Gruppo di indice zero
Il gruppo di omologia è sempre isomorfo a , dove è il numero di componenti connesse per archi dello spazio topologico . In particolare, se è connesso per archi vale l'isomorfismo seguente:




Gruppo di indice uno
Se è uno spazio connesso per archi, il gruppo di omologia intera di indice 1 è determinato dal gruppo fondamentale di . Si tratta infatti dell'abelianizzato del gruppo fondamentale:

![{\displaystyle H_{1}(X,\mathbb {Z} )=\pi _{1}(X)/{\left[\pi _{1}(X),\pi _{1}(X)\right]}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/546083c7068b844fe1dd8ed01550b2679e79ec84)
ovvero quozientato per il suo sottogruppo derivato , il più piccolo sottogruppo normale di che contiene tutti i commutatori dei suoi elementi. Il quoziente è effettivamente un gruppo abeliano: in generale, i gruppi di omologia sono tutti abeliani, mentre il gruppo fondamentale può non esserlo.
![{\displaystyle [\pi _{1}(X),\pi _{1}(X)]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/fd700169fd1aa392b4ee9f40bb3e7909053fe66c)
L'analogia con i gruppi di omotopia termina a questo livello: il secondo gruppo di omologia non è determinato dal secondo gruppo di omotopia .


Gruppo di indice massimo
Se è una varietà di dimensione , tutti i gruppi di omologia di indice superiore a sono banali. Il gruppo di indice massimo è inoltre determinato da due condizioni topologiche: l'orientabilità e la compattezza di . Se è l'anello degli interi o un campo e è connessa, vale il fatto seguente:


Per "compatta" si intende "compatta senza bordo" (cioè chiusa).
Esempi
Una varietà compatta (più in generale, un complesso di celle finito) di dimensione ha tutti i gruppi di omologia di ordine maggiore di banali. Per conoscere l'omologia di un tale spazio è quindi sufficiente elencarne i gruppi di ordine fino a . L'omologia è definita su un anello (generalmente, l'anello degli interi o un campo).
Sfere
Come già accennato, l'omologia della sfera -dimensionale è la seguente:

Superfici
Una superficie orientabile compatta di genere ha i seguenti gruppi di omologia:



Spazi proiettivi
Lo spazio proiettivo complesso è una varietà di dimensione . I suoi gruppi di omologia sono i seguenti.



Brevemente, i gruppi di ordine pari sono isomorfi ad e quelli di ordine dispari sono banali.
L'omologia dello spazio proiettivo reale è più complicata: questa dipende infatti dall'anello . Ad esempio, se è l'anello degli interi si ottengono i gruppi seguenti:

I gruppi di indice dispari sono quindi gruppi ciclici di ordine 2, tranne eventualmente l'ultimo. Lo spazio proiettivo reale è orientabile solo per dispari: solo in questo caso il gruppo di omologia di ordine massimo è isomorfo a .
Applicazioni
Teorema di Brouwer
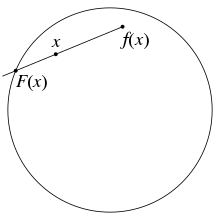

Con l'omologia è possibile dimostrare il teorema del punto fisso di Brouwer, che asserisce che ogni funzione continua dal disco -dimensionale in sé ha un punto fisso. La dimostrazione procede nel modo seguente: se per assurdo non esistesse un punto fisso, i punti e sarebbero distinti per ogni : intersecando la retta passante per questi due punti con il bordo del disco si costruisce una retrazione dal disco al suo bordo.




Non esiste però nessuna retrazione dal disco al suo bordo: una tale mappa infatti dovrebbe indurre una mappa suriettiva

in omologia. Questo è impossibile, perché per l'omologia del disco è banale e quella della sfera no.

Spazi non omeomorfi
L'omologia è uno strumento utile a distinguere spazi topologici. Ad esempio, la sfera e lo spazio proiettivo complesso sono due varietà della stessa dimensione . Sono entrambe semplicemente connesse. Se , gli spazi e sono effettivamente omeomorfi. Per però non lo sono, perché hanno omologie differenti: quella della sfera è sempre banale (tranne per ) mentre quella dello spazio proiettivo è non banale per ogni pari.





Strumenti
Successione di Mayer-Vietoris


La successione di Mayer-Vietoris è un importante strumento utile a calcolare l'omologia di uno spazio topologico a partire da una sua "decomposizione": più precisamente, a partire da un suo ricoprimento in due aperti . Similmente al teorema di Van Kampen per i gruppi fondamentali, la successione mette in relazione i gruppi di omologia degli spazi , , e . Le omologie di questi spazi formano una successione esatta lunga:





Se si conoscono le omologie di e le mappe naturali fra queste è quindi possibile dedurre l'omologia per .

Formula di Künneth
La formula di Künneth permette di calcolare l'omologia di un prodotto a partire dalle omologie dei singoli fattori e . Quando l'anello è un campo, la formula è la seguente:


La formula fa uso del prodotto tensoriale fra spazi vettoriali.

Bibliografia
- Allen Hatcher, Algebraic topology, Cambridge University Press, 2002, ISBN 0-521-79160-X, OCLC 45420394.
Voci correlate
Altri progetti
Altri progetti
- Wikimedia Commons
 Wikimedia Commons contiene immagini o altri file sull'omologia
Wikimedia Commons contiene immagini o altri file sull'omologia
Collegamenti esterni
- (EN) Robert Osserman, homology, su Enciclopedia Britannica, Encyclopædia Britannica, Inc.

- (EN) Eric W. Weisstein, Omologia, su MathWorld, Wolfram Research.


| Controllo di autorità | Thesaurus BNCF 45391 · LCCN (EN) sh85061770 · J9U (EN, HE) 987007565420705171 |
|---|
 Portale Matematica: accedi alle voci di Wikipedia che trattano di matematica
Portale Matematica: accedi alle voci di Wikipedia che trattano di matematica










